Jak dobrać sterownik silnika krokowego
STEROWNIKI
JAK DOBRAĆ STEROWNIK DO SILNIKA ?
PRĄD STEROWNIKA
Dobór odpowiedniego sterownika do silnika jest ważny ze względu na wydajność prądową i wytrzymałość napięciową. Pod względem prądu sterownik powinien zapewniać dostarczenie prądu do silnika o wartości znamionowej podanej na silniku. Wartość ta nie powinna różnić się więcej jak +/- 5% od wartości prądu silnika.
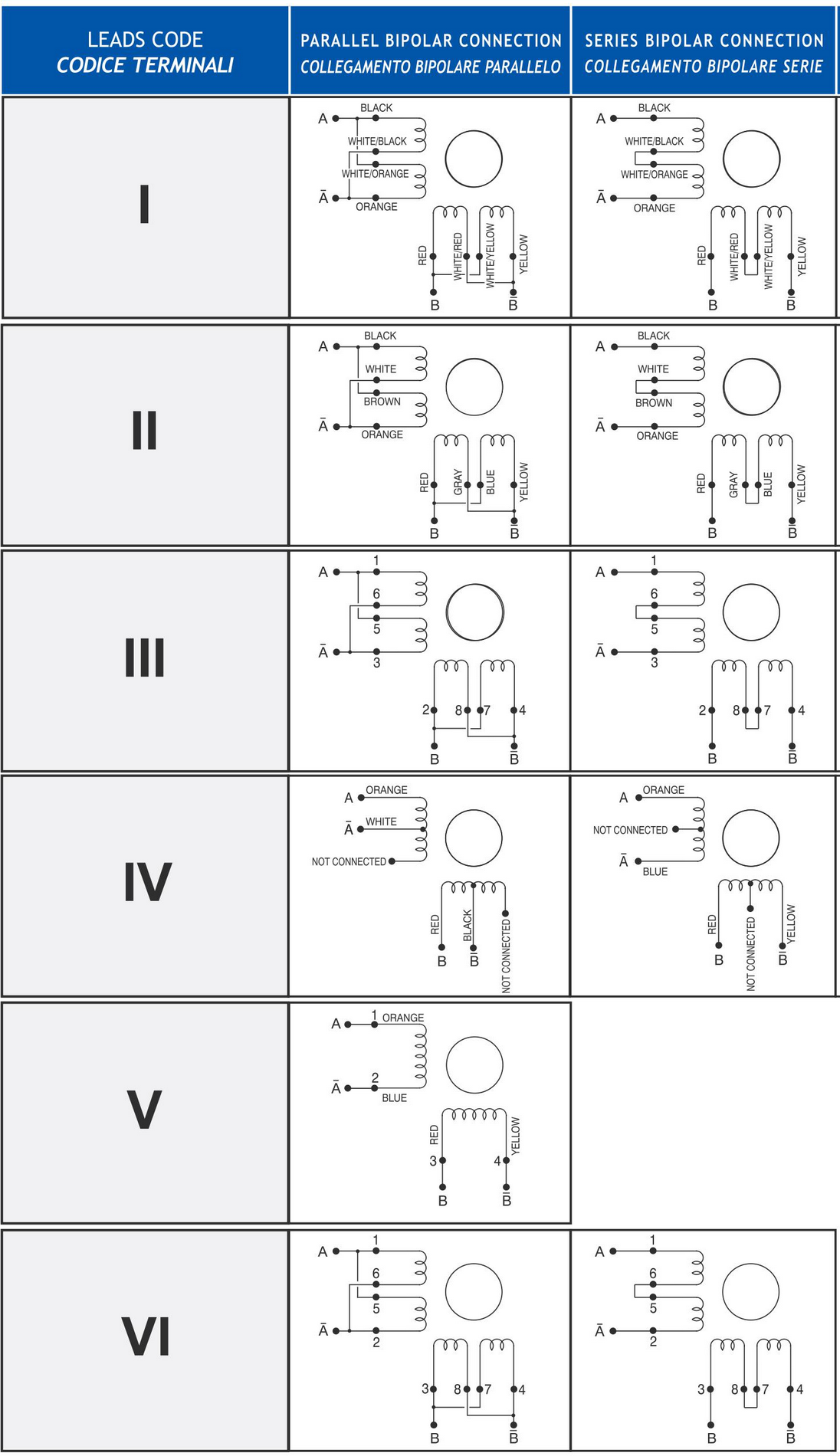
W przypadku silników 8 przewodowych wartość prądu znamionowego podanego na silniku dotyczy prądu przy szeregowym połaczeniu uzwojeń.
W przypadku połaczenia równoległego wartość prądu obliczamy: prąd x 1,4 = wymagany prąd sterownika.
Przykład:
silnik 8 przewodowy prąd znamionowy 3A
przy połączeniu szeregowym - prąd ustawiony na sterowniku = 3A
przy połączeniu równoległym - 3 x 1,4 = 4,2A na sterowniku należy ustawić prąd 4,2A
Wartość prawidłowego ustawienia prądu ma duże znaczenie w przypadku pracy mikrokrokowej z dużymi podziałami. Od prawidłowo nastawionego prądu zależy równomierność przemieszczania się wirnika silnika w obrębie pełnego kroku. Rzutuje to bezpośrednio pomijając równy rozkład mikrokroków, na rezonanse silnika w niektórych przedziałach obrotów. W aplikacjach gdzie ważne jest równomierne przemieszczanie osi silnika o niewielkie kąty, należy zadbać o właściwie ustawiony prąd. Ustawienie prądu znacząco większego od wartości znamionowej silnika będzie skutkowało jego przegrzewaniem a w skrajnym przypadku spaleniem uzwojeń. Poniżej w tabeli przedstawiono sposoby połaczeń uzwojeń silników krokowych w zależności od oznaczeń kabli. Należy nadmienić że są to najpopularniejsze oznaczenia, w praktyce można spotkać się z innymi kolorami wyprowadzeń. W tabeli ujęte są tylko bipolarne sposoby połączeń z racji tego że produkowane przez firmę JAWO sterowniki przeznaczone są tylko do pracy bipolarnej.
NAPIĘCIE STEROWNIKA
Pod względem doboru napięcia sterownika należy na uwadze mieć dwa zjawiska. Pierwsza sprawa to ścisły związek z możliwością uzyskania wysokich użytecznych prędkości obrotowych silnika z napięciem zasilania. Druga to wytrzymałość napięciowa sterownika na generowaną przez silnik siłę elektromotoryczną (SEM). Właściwy dobór wytrzymałości napięciowej sterownika jest kluczowy dla bezawaryjnej pracy napędu. Silnik krokowy w chwilach hamowania czy wytracania prędkości, zachowuje się jak prądnica generując znaczną SEM. Jeżeli silnik jest w stanie wygenerować SEM większą od dopuszczalnego napięcia zasilania sterownika, może spowodować jego uszkodzenie. W niektórych przypadkach użytkownicy przyjmują błędne założenie że stosując sterownik niskonapięciowy do dużego silnika, układ się sprawdzi przy aplikacjach niskoobrotowych i dodatkowo zasilanych napięciem znacznie niższym od znamionowego. Niespodzianka może się zdarzyć w chwili kiedy silnik zostanie wprawiony w ruch siłą zewnętrzną, nawet przy wyłączonym zasilaniu. Silnik zdolny do wygenerowania SEM większej od wytrzymałości sterownika uszkodzi go.
Sytuacje takie mają miejsce np. przy ploterach bramowych. Przy wyłączonej maszynie wystarczy ręcznie przepchnąć bramę na inną pozycję, aby spowodować awarię.
Dlatego powyżej pewnej wielkości silników należy bezwględnie stosować sterowniki o wyższej wytrzymałości napięciowej. Producenci silników jako jeden z parametrów podają wytwarzaną siłę elektromotoryczną w stosunku do obrotów. Ułatwia to podjęcie decyzji o doborze sterownika.
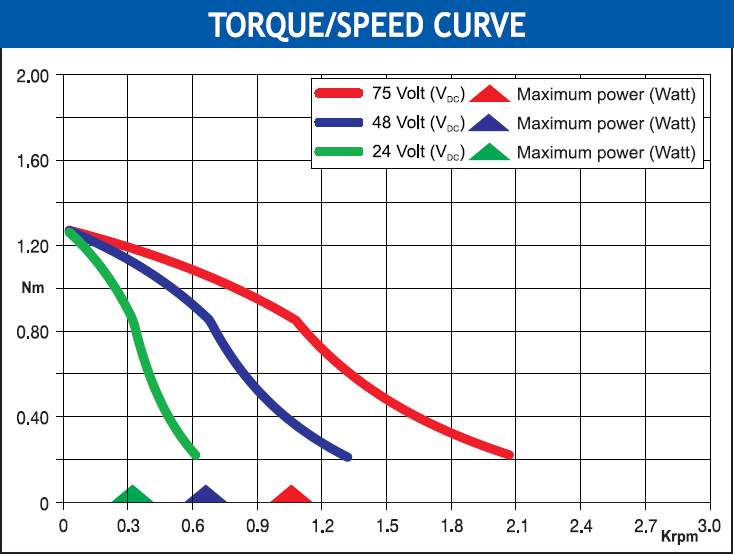
Wracając do związku obrotów użytecznych z napięciem, silnik krokowy jest maszyną synchroniczną. Ruch wirnika odbywa się w niewielkich skokach (krokach). Po każdym impulsie sterującym wirnik zmienia pozycję o jeden krok ew. mikrokrok. Odpowiednie fazy silnika sterowane są ściśle zaprogramowaną wartością prądu.
Przy niewielkich obrotach (małej częstotliwości zmiany prądu w uzwojeniach) wirnik obraca się generując moment znamionowy. Przy zwiększaniu częstotliwości impulsów sterujących, czyli zwiększaniu obrotów coraz większe znaczenie ma SEM generowana w uzwojeniach. Przeciwdziała ona szybkości narastania prądu w uzwojeniach. Prowadzi to bezpośrednio do spadku momentu obrotowego silnika. Wynika to z faktu że w coraz krótszych impulsach sterujących prąd nie zdąża osiągnąć wymaganej wartości. Częściowo przeciwdziałać temu zjawisku można zwiększając napięcie zasilania, powoduje to bardziej strome narastanie prądu w uzwojeniach.
Tym samym zwiększa się moment obrotowy (moc) silnika przy wyższych obrotach. Z faktu tego wynika też że silniki o mniejszej indukcyjności uzwojeń lepiej nadają się do aplikacji wymagających wyższych obrotów. Mniejsza indukcyjność uzwojeń generuje mniejszą SEM która przeciwstawia się się szybkiemu narastaniu prądu.
Zależność momentu od napięcia doskonale ilustruje poniższa charakterystyka przykładowego silnika.